1. คุณลักษณะทางเทคนิคของมอเตอร์ eVTOL
In ระบบไฟฟ้าแบบกระจายในระบบขับเคลื่อน มอเตอร์จะขับเคลื่อนใบพัดหรือพัดลมหลายตัวบนปีกหรือลำตัวเพื่อสร้างระบบขับเคลื่อนที่ให้แรงขับแก่เครื่องบิน ความหนาแน่นของกำลังของมอเตอร์ส่งผลโดยตรงต่อความสามารถในการบรรทุกของเครื่องบิน กำลังส่งออก ความน่าเชื่อถือ และความสามารถในการปรับตัวเข้ากับสภาพแวดล้อมของมอเตอร์เป็นปัจจัยสำคัญในการกำหนดลักษณะไดนามิกและความปลอดภัยของเครื่องบินขับเคลื่อนด้วยไฟฟ้า การเลือกมอเตอร์สำหรับยานพาหนะไฟฟ้า โดรน และ eVTOL นั้นแตกต่างกันเนื่องจากต้นทุน สถานการณ์การใช้งาน และเหตุผลอื่นๆ ที่แตกต่างกัน [1]

(ที่มาของภาพ: เว็บไซต์อย่างเป็นทางการของ Network/Safran)
1) รถยนต์ไฟฟ้า: แม่เหล็กถาวรมากขึ้นมอเตอร์ซิงโครนัสมอเตอร์แม่เหล็กถาวรที่มีประสิทธิภาพและแรงบิดสูงกว่า สามารถมอบประสบการณ์การขับขี่ที่ดีกว่า ในขณะเดียวกัน ความหนาแน่นของกำลังไฟฟ้าสูงของมอเตอร์แม่เหล็กถาวรยังช่วยให้รถยนต์ไฟฟ้ามีกำลังสูงขึ้นภายใต้ปริมาตรเท่าเดิมได้อีกด้วย
(2) UAV: โดรนไร้แปรงถ่านที่ใช้กันทั่วไปมอเตอร์กระแสตรง (DC motor)มอเตอร์ DC แบบไร้แปรงถ่านมีน้ำหนักเบา เสียงรบกวนต่ำ และค่าบำรุงรักษาต่ำ ซึ่งเหมาะสมกับความต้องการในการบินของโดรน (UAV) ประการที่สอง มอเตอร์ DC แบบไร้แปรงถ่านมีความเร็วสูงกว่า ซึ่งเหมาะสมกับความต้องการในการบินด้วยความเร็วสูงของโดรน ตัวอย่างเช่น DJI ใช้มอเตอร์แบบไร้แปรงถ่าน
(3) eVTOL: ด้วยความต้องการที่สูงขึ้นสำหรับประสิทธิภาพของมอเตอร์และความหนาแน่นของแรงบิด มอเตอร์ซิงโครนัสแม่เหล็กถาวรจึงเป็นทางออกที่น่าสนใจมากสำหรับระบบพลังงานขับเคลื่อนด้วยไฟฟ้า เนื่องจากมอเตอร์แม่เหล็กถาวรแบบฟลักซ์แกนมีอัตราการใช้พื้นที่รัศมีสูง และความหนาแน่นของกำลังและความหนาแน่นของแรงบิดมีข้อดีในกรณีที่อัตราส่วนความยาวต่อเส้นผ่านศูนย์กลางมีขนาดเล็ก เครื่องบิน VTOL ไฟฟ้าในปัจจุบัน เช่น Joby S4 และ Archer Midnight ล้วนใช้มอเตอร์ซิงโครนัสแม่เหล็กถาวร [1]
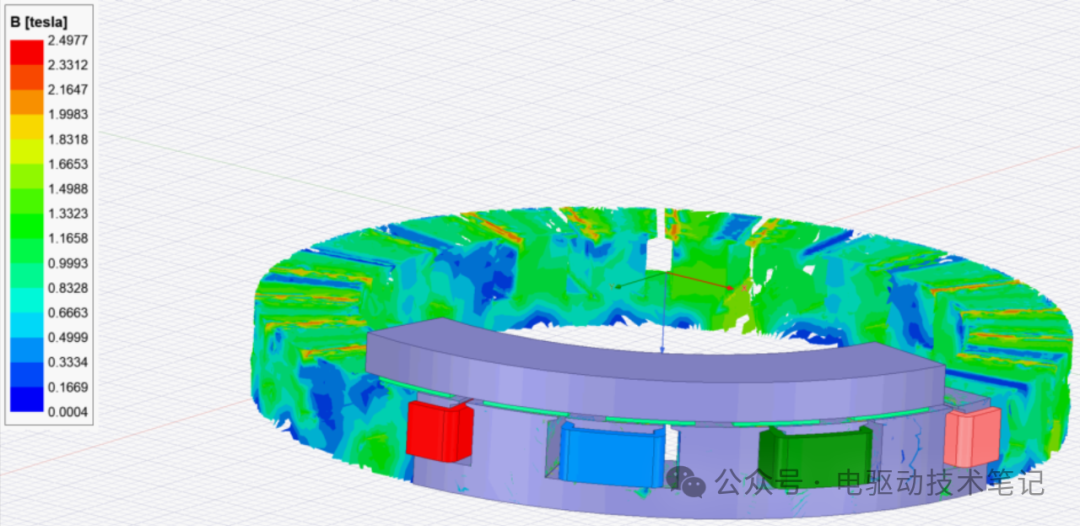
รูปต่อไปนี้แสดงภาพเมฆของความเข้มของการเหนี่ยวนำแม่เหล็กของโรเตอร์คงที่ของมอเตอร์ฟลักซ์แกนเดียวแบบสเตเตอร์เดียวโรเตอร์
รูปต่อไปนี้เป็นการเปรียบเทียบพารามิเตอร์ของมอเตอร์เครื่องบินไฟฟ้าและรถยนต์ไฟฟ้า

2. แนวโน้มการพัฒนาเครื่องยนต์ eVTOL
ปัจจุบัน แนวโน้มการพัฒนาหลักของระบบพลังงาน eVTOL คือการลดน้ำหนักของโครงสร้างมอเตอร์และน้ำหนักเสริมของระบบระบายความร้อนโดยการปรับปรุงเทคโนโลยีการออกแบบแม่เหล็กไฟฟ้า เทคโนโลยีการจัดการความร้อน และเทคโนโลยีน้ำหนักเบา และปรับปรุงความหนาแน่นของกำลังของมอเตอร์และความสามารถในการส่งออกกำลังในสภาวะแปรผันที่หลากหลายอย่างต่อเนื่อง ตาม “การวิจัยและพัฒนาของรถบินและเทคโนโลยีหลัก” มอเตอร์ขับเคลื่อนการบินสามารถทำให้ความหนาแน่นของกำลังพิกัดของตัวมอเตอร์มากกว่า 5 กิโลวัตต์/กิโลกรัมได้โดยใช้วัสดุฉนวนที่มีขีดจำกัดอุณหภูมิสูงขึ้น วัสดุแม่เหล็กถาวรที่มีความหนาแน่นของพลังงานแม่เหล็กสูงขึ้น และวัสดุโครงสร้างที่เบากว่า โดยการปรับปรุงการออกแบบโครงสร้างแม่เหล็กไฟฟ้าของมอเตอร์ เช่น การใช้ชุดแม่เหล็ก Halbach โครงสร้างที่ไม่มีแกนเหล็ก การพันลวด Litz และเทคโนโลยีอื่นๆ รวมถึงการปรับปรุงการออกแบบการระบายความร้อนของมอเตอร์ คาดว่าความหนาแน่นของกำลังพิกัดของตัวมอเตอร์จะถึง 10 กิโลวัตต์/กิโลกรัมในปี 2030 และความหนาแน่นของกำลังพิกัดจะเกิน 13 กิโลวัตต์/กิโลกรัมในปี 2035 [1]

3. การเปรียบเทียบเส้นทางที่ใช้พลังงานไฟฟ้าล้วนและเส้นทางไฮบริด
เมื่อเปรียบเทียบกับเส้นทางไฟฟ้าล้วนและเส้นทางไฮบริด จากการคัดเลือกผู้ผลิตที่เกี่ยวข้องในปัจจุบัน โครงการ eVTOL ในประเทศส่วนใหญ่ยังคงใช้รูปแบบไฟฟ้าล้วน ซึ่งถูกจำกัดด้วยความหนาแน่นของพลังงานของแบตเตอรี่ลิเธียมไอออน และ eVTOL ที่มีความจุผู้โดยสารต่ำเป็นฉากที่เหมาะสมที่สุดสำหรับเทคโนโลยีการขับเคลื่อนด้วยไฟฟ้าล้วน ในต่างประเทศ ผู้ผลิตบางรายได้วางแผนไฮบริดไว้ล่วงหน้า และเป็นผู้นำในการทดสอบและปรับปรุงหลายรอบ ดังที่เห็นได้จากตารางต่อไปนี้ รูปแบบไฮบริดมีความแข็งแกร่งกว่าอย่างเห็นได้ชัดในมุมความทนทาน และสามารถนำไปประยุกต์ใช้ได้มากขึ้นในสถานการณ์การจราจรระยะกลางถึงไกลและระดับความสูงต่ำในอนาคต [1]
วันที่เผยแพร่: 27 กุมภาพันธ์ 2568